第 3 有限差分法
3.1 泰勒级数(Taylor Series)
泰勒级数(Taylor series)是数学中一个重要的概念,它提供了一种将函数表示为无限项的幂级数的方法。这种表示方法在微积分、复分析、数值分析以及物理学的许多领域中都有广泛的应用。泰勒级数是以于1715年发表了泰勒公式的英國数学家布魯克·泰勒(Sir Brook Taylor)来命名的。
以下是用学术语言对泰勒级数的介绍:
定义: 设函数 \(f(x)\) 在点 \(a\) 处无限次可微,则该函数在 \(a\) 点的泰勒级数展开式为:
\[ f(x) = \sum_{n=0}^{\infty} \frac{f^{(n)}(a)}{n!} (x-a)^n \]
其中,\(f^{(n)}(a)\) 表示函数 \(f\) 在点 \(a\) 处的第 \(n\) 阶导数,\(n!\) 是 \(n\) 的阶乘。
收敛性: 泰勒级数的收敛性取决于函数的性质和展开点的选择。根据泰勒定理,如果函数 \(f(x)\) 在包含 \(a\) 的某个开区间内无限次可微,则对于该区间内的任意 \(x\),泰勒级数都收敛于 \(f(x)\)。收敛区间可以通过比值判别法、根值判别法等方法确定。
余项: 泰勒级数的余项(R remainder)是实际函数值与泰勒级数部分和之间的差值。根据泰勒定理,余项 \(R_n(x)\) 可以表示为:
\[ R_n(x) = \frac{f^{(n+1)}(c)}{(n+1)!}(x-a)^{n+1} \]
其中 \(c\) 是 \(a\) 和 \(x\) 之间的某个点。余项的存在说明了泰勒级数近似的误差。
应用: 泰勒级数在求解复杂函数的近似值、计算定积分、求解微分方程以及在物理学中分析波动和场的传播等方面都有重要应用。通过泰勒级数,可以将难以直接求解的问题转化为多项式问题,从而简化计算。
特殊情形: 当展开点 \(a = 0\) 时,泰勒级数称为麦克劳林级数(Maclaurin series),它是泰勒级数的一个特例。
泰勒级数的引入,不仅丰富了数学分析的内容,也为解决实际问题提供了强有力的工具。通过对函数的局部线性化,泰勒级数在理论和应用上都显示出了其独特的价值。
泰勒展开式的基本形式:
\[\begin{equation} f(x) = \sum_{k=0}^n \frac{f^{(n)}(0) }{n!}( x) ^{n} \tag{3.1} \end{equation}\]
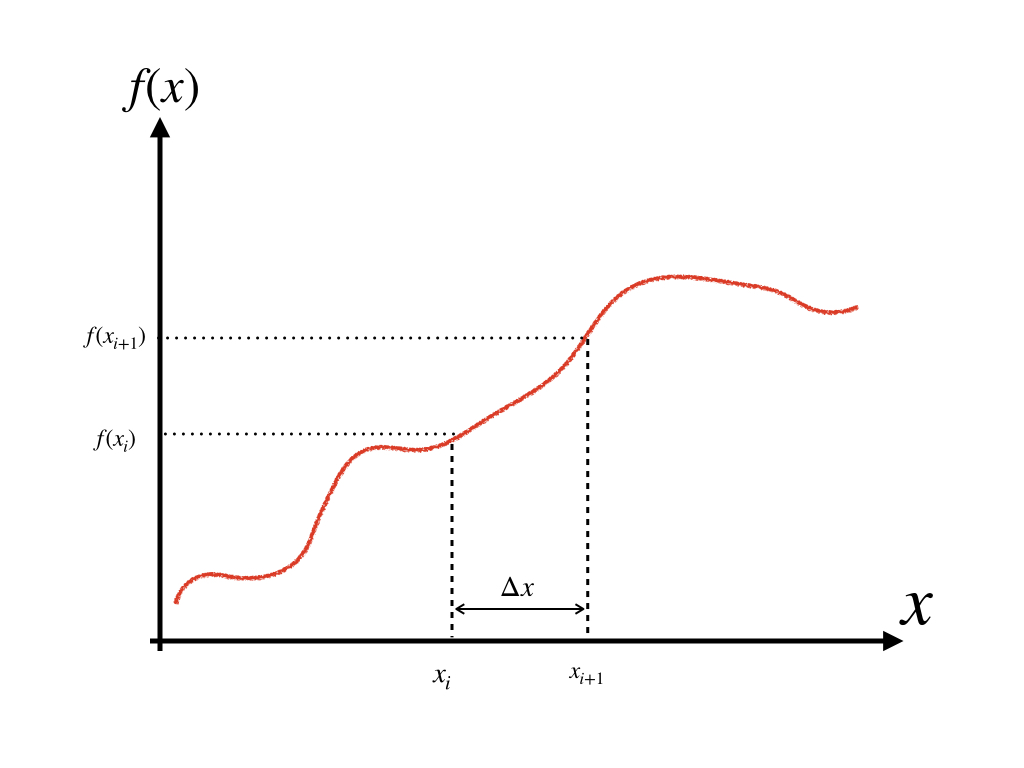
根据泰勒展开式,通过\(f(x)\)和其任意阶的导数,可以获得任意\(\Delta x\)值下的函数值\(f(x + \Delta x)\) ,即:
\[\begin{equation} f(x+\Delta x) = f(x) + \frac{f'(x)}{1!} \Delta x + \frac{f^{''}(x)}{2!} \Delta x^2 + \frac{f^{'''}(x)}{3!} \Delta x^3+\dotsb + \frac{f^{(n)}(x) }{n!}( \Delta x) ^{n} \tag{3.2} \end{equation}\]
或者在\(-\Delta x\)位置,可写为:
\[\begin{equation} f(x-\Delta x) = f(x) - \frac{f'(x)}{1!} \Delta x + \frac{f^{''}(x)}{2!} \Delta x^2 - \frac{f^{'''}(x)}{3!} \Delta x^3+\dotsb + \frac{f^{(n)}(x) }{n!}(- \Delta x) ^{n} \tag{3.3} \end{equation}\]
以上公式也可以写为: \[\begin{equation} u_{i+1} = u_{i} + \frac{u^{'}_{i}}{1!} \Delta x + \frac{u^{''}_{i}}{2!} \Delta x^2 + \frac{u^{'''}_{i}}{3!} \Delta x^3+\dotsb + \frac{u^{(n)}_{i} }{n!}( \Delta x) ^{n} \tag{3.4} \end{equation}\]
\[\begin{equation} u_{i-1} = u_{i} - \frac{u^{'}_{i}}{1!} \Delta x + \frac{u^{''}_{i}}{2!} \Delta x^2 - \frac{u^{'''}_{i}}{3!} \Delta x^3+\dotsb + \frac{u^{(n)}_{i} }{n!}(- \Delta x) ^{n} \tag{3.5} \end{equation}\]
3.1.1 截断误差
在泰勒级数的应用中,截断误差(truncation error)是一个重要的概念,它描述了当我们使用有限项的泰勒级数来近似一个函数时所产生的误差。
定义: 截断误差是指在泰勒级数展开中,由于只取有限项而忽略剩余无限项所引起的误差, 数学表达为\(O()\)。具体来说,如果我们对函数 \(f(x)\) 在点 \(a\) 处进行泰勒级数展开,并只取前 \(n\) 项,那么截断误差就是函数在 \(x\) 处的真实值与这 \(n\) 项部分和之间的差值。
\(O(2)\)和\(O(3)\)分别表示为在泰勒展开式上的二阶和三阶导数上的误差。截取误差的阶数越高,误差越小。
数学表达: 如果 \(f(x)\) 在 \(a\) 处的泰勒级数为:
\[ f(x) = \sum_{k=0}^{\infty} \frac{f^{(k)}(a)}{k!} (x-a)^k \]
那么,当我们取前 \(n\) 项时,截断误差 \(T_n(x)\) 可以表示为:
\[ O(n) = f(x) - \sum_{k=0}^{n} \frac{f^{(k)}(a)}{k!} (x-a)^k \]
余项的另一种形式: 在泰勒定理中,余项 \(R_n(x)\) 也可以用来描述截断误差。对于拉格朗日形式的余项,我们有:
\[ R_n(x) = \frac{f^{(n+1)}(c)}{(n+1)!} (x-a)^{n+1} \]
其中 \(c\) 是 \(a\) 和 \(x\) 之间的某个点。这个余项提供了截断误差的一个上界,即:
\[ |O(x)| \leq |R_n(x)| \]
\[O(1) = \frac{u^{''}_{i}}{2!} \Delta x^2+\frac{u^{'''}_{i}}{3!} \Delta x^3+\frac{u^{(4)}_{i}}{4!} \Delta x^4+\dotsb + \frac{u^{(n)}_{i} }{n!}( \Delta x) ^{n}\]
\[O(2) = \frac{u^{'''}_{i}}{3!} \Delta x^3+\dotsb + \frac{u^{(n)}_{i} }{n!}( \Delta x) ^{n}\] \[O(3) = \frac{u^{(4)}_{i}}{4!} \Delta x^4+\dotsb + \frac{u^{(n)}_{i} }{n!}( \Delta x) ^{n}\]
影响因素: 截断误差的大小受到多个因素的影响,包括: 1. 函数 \(f(x)\) 在 \(a\) 附近的平滑性。 2. 点 \(x\) 与展开点 \(a\) 之间的距离。 3. 所取泰勒级数项数 \(n\) 的大小。
减小截断误差: 为了减小截断误差,可以采取以下措施: 1. 增加泰勒级数的项数 \(n\)。 2. 选择更接近 \(x\) 的展开点 \(a\)。 3. 选择一个更平滑的函数或者在更平滑的区间内进行展开。
截断误差是评估泰勒级数近似效果的重要指标,对于数值计算和函数逼近的准确性具有重要意义。在实际应用中,理解和控制截断误差对于提高计算结果的可靠性至关重要。
何种情况下,泰勒展开式的截断误差为0?
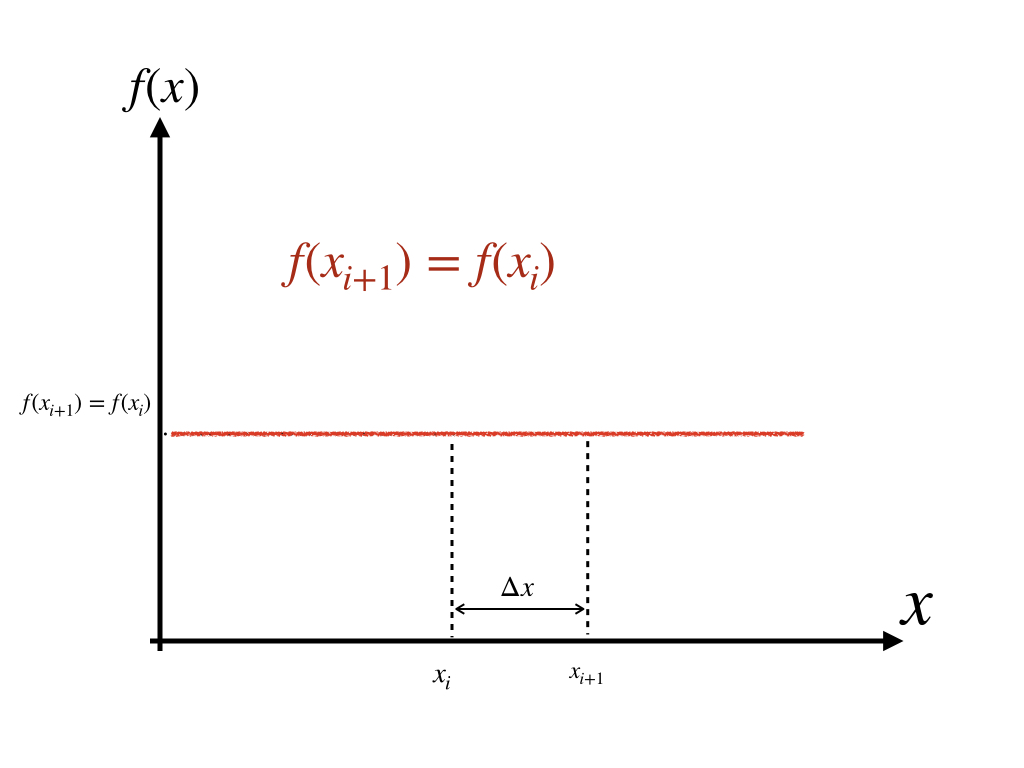
- \(O(0) = 0\) 时,意味着:\(f(x+\Delta x) = f(x)\)。则该函数为\(f(x) = C\), \(C\)为常数。 如图:
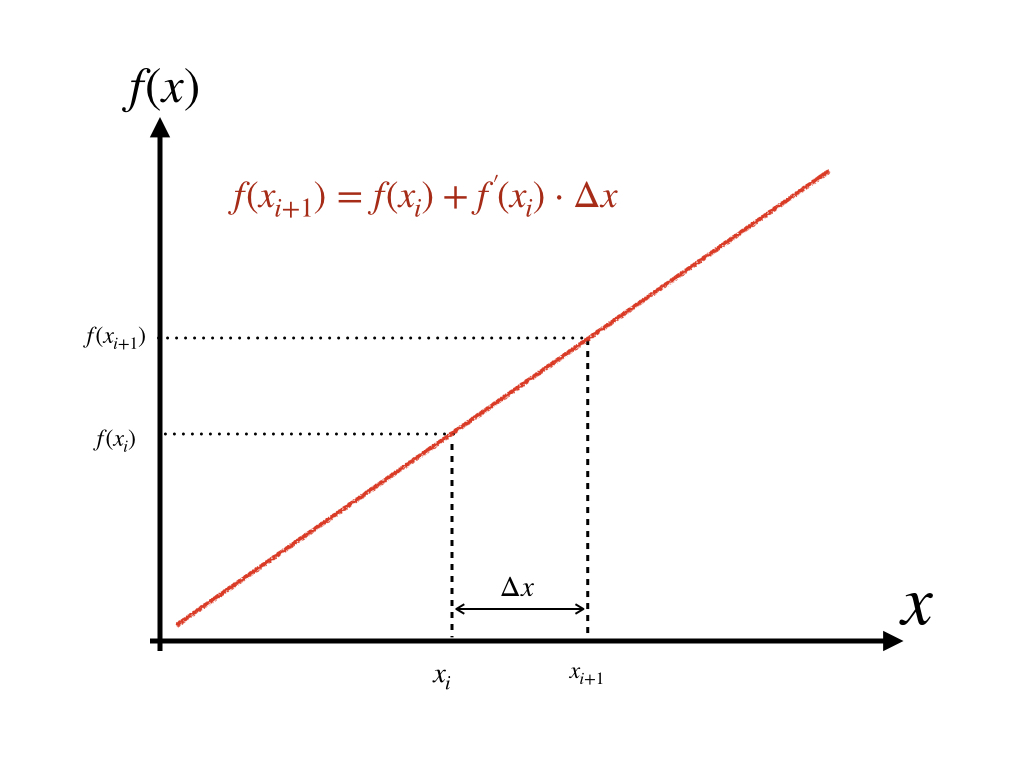
- \(O(1) = 0\) 时,意味着:\(f(x+\Delta x) = f(x) + f^{'}(x) \cdot \Delta x\)。则该函数为\(f(x) = ax + b\)。 如图:
如何依据泰勒级数,得到函数的一阶和二阶导数?
3.1.2 一阶导数
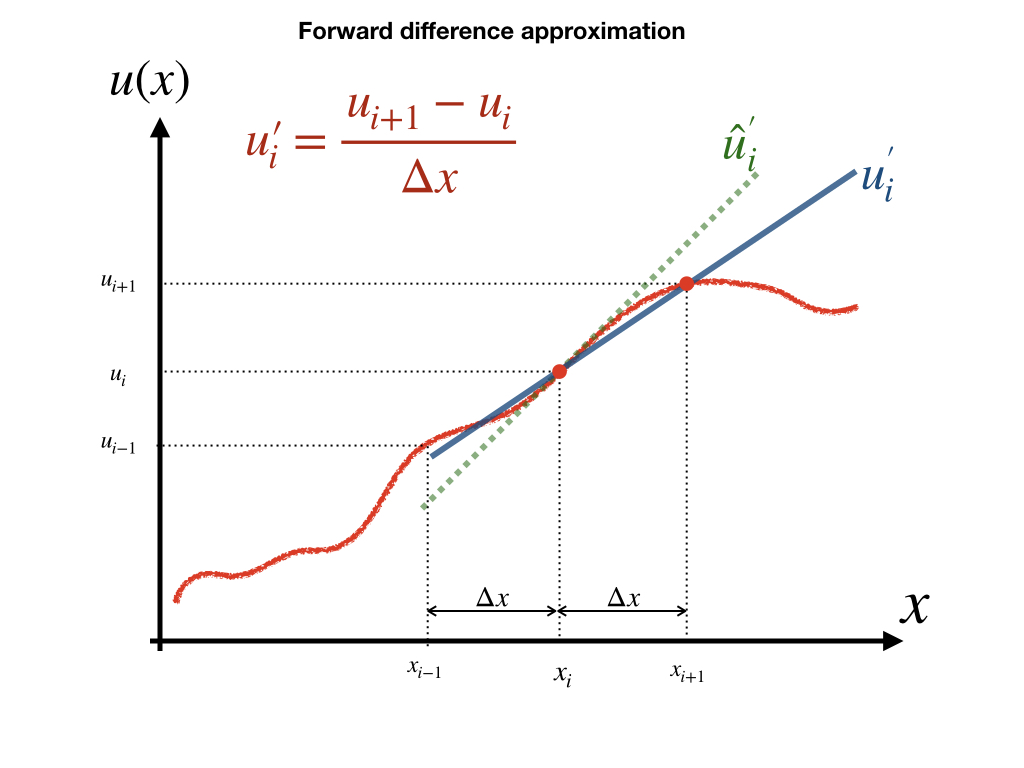
3.1.2.1 向前估计 (Forward Approximation)
采纳一阶截断误差,我们可将公式(3.2)写为: \[\begin{equation} f(x+\Delta x) = f(x) + \frac{f'(x)}{1!} \Delta x + O(1) \end{equation}\] 则: \[\begin{equation} f'(x) = \frac {f(x+\Delta x) - f(x) } {\Delta x} \tag{3.6} \end{equation}\] 或者 \[\begin{equation} u'_{i} = \frac {u_{i+1} - u_{i} } {\Delta x} \tag{3.6} \end{equation}\]
注:公式(3.6)隐含了\(O(1)\)的误差。
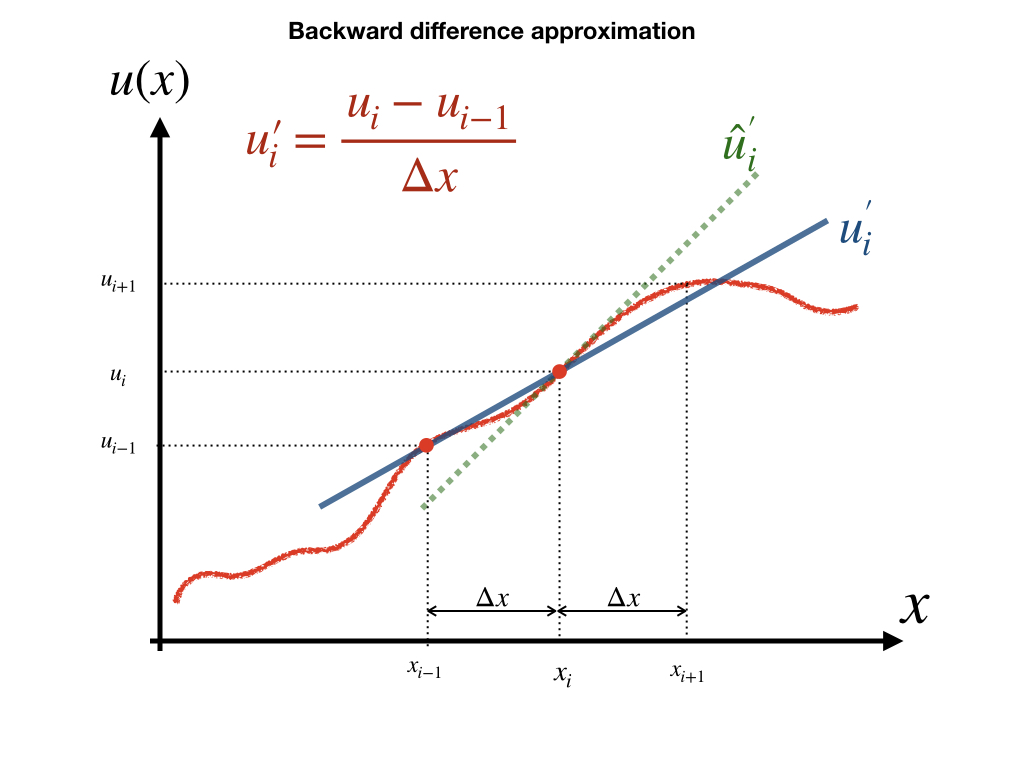
3.1.2.2 向后估计 (Backward Approximation)
采纳一阶截断误差,我们可将公式(3.3)写为: \[\begin{equation} f(x-\Delta x) = f(x) - \frac{f'(x)}{1!} \Delta x + O(1) \end{equation}\] 则: \[\begin{equation} f'(x) = \frac {f(x) -f(x+\Delta x) } {\Delta x} \tag{3.7} \end{equation}\] 或者 \[\begin{equation} u'_{i} = \frac { u_{i} - u_{i+1}} {\Delta x} \tag{3.7} \end{equation}\]
注:公式(3.7)隐含了\(O(1)\)的误差。
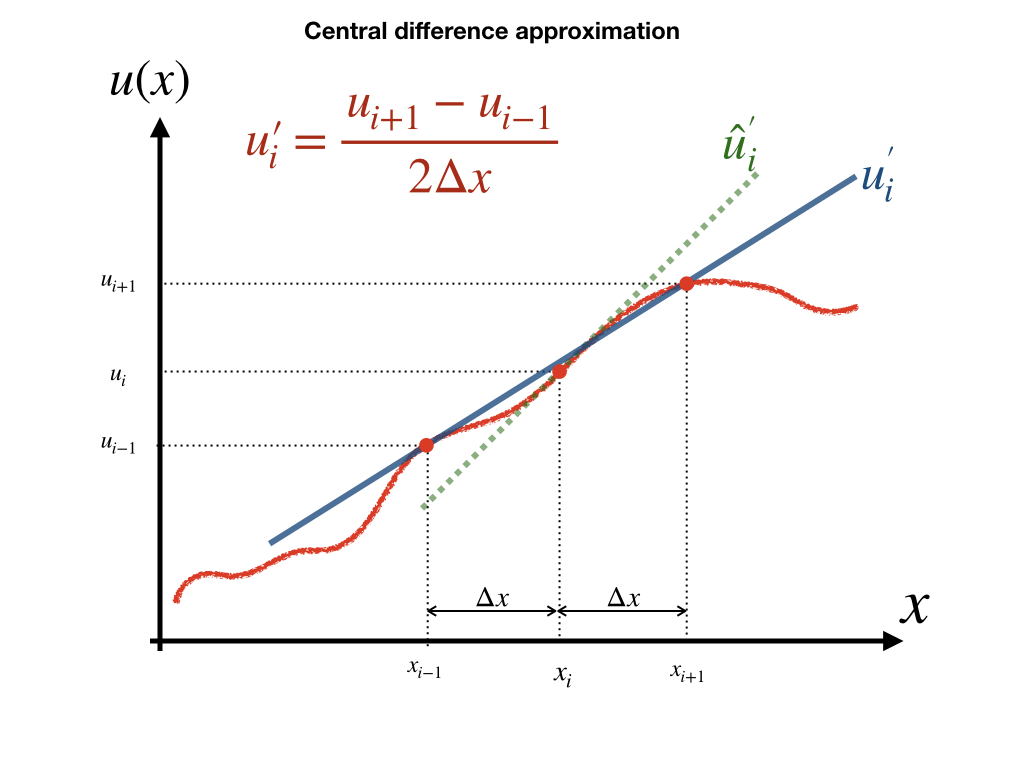
3.1.2.3 中心估计 (Central Approximation)
中心估计算法中,我们将从公式(3.2)减去公式(3.3),得到: \[ f(x+\Delta x) - f(x-\Delta x) = 0 + 2 * \frac{f'(x)}{1!} \Delta x + 0 + 2 * \frac{f^{'''}(x)}{3!} + ... \]
截断误差由以上公式右边的第四项(三阶导数)开始,则该公式的截取误差为\(O(2)\),即二阶精度的截取误差,公式表达为: \[ f(x+\Delta x) - f(x-\Delta x) = 0 + 2 * \frac{f'(x)}{1!} \Delta x + 0 + O(2) \] 可得到二阶精度的一阶导数的中心估计: \[\begin{equation} f'(x) = \frac {f(x+\Delta x) -f(x-\Delta x) } {2\Delta x} \tag{3.8} \end{equation}\] 或者 \[\begin{equation} u'_{i} = \frac { u_{i+1} - u_{i21}} {2\Delta x} \tag{3.8} \end{equation}\]
公式(3.8)隐含了\(O(2)\)的误差,同时(3.6)和(3.7)都隐含了\(O(1)\)的误差。
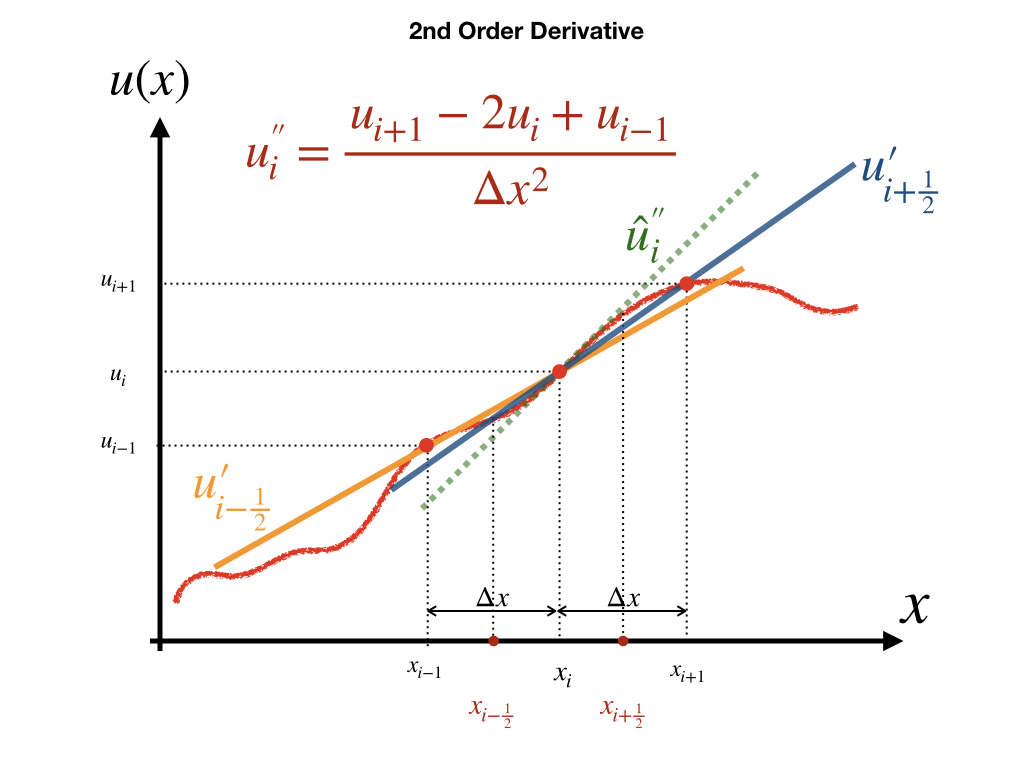
3.1.3 二阶导数
\[\begin{equation} f(x+\Delta x) + f(x-\Delta x) = 2 \cdot f(x) + 0 + 2 \cdot \frac{f^{''}(x)}{2!} \Delta x^2 + 0 + 2 \cdot \frac{f^{(4)}(x)} {4!} \Delta x^4 + \dotsb \tag{3.9} \end{equation}\]
公式(3.9)来自公式 (3.2)和(3.3)的相加,三阶导数项在相加过程中为零,因此我们截取其三阶截取误差,则公式(3.9)可写为: \[\begin{equation} f(x+\Delta x) + f(x-\Delta x) = 2f(x) + f^{''}(x) \Delta x^2 + O(3) \tag{3.10} \end{equation}\]
根据公式(3.10),我们可获得函数\(f(x)\)在\(x\)位置的二阶导数为:
\[\begin{equation} f^{''}(x) = \frac { f(x+\Delta x) - 2f(x) + f(x-\Delta x) } { \Delta x^2 } + O(3) \tag{3.11} \end{equation}\]
当移除其三阶截断误差\(O(3)\)后,我们得到近似的二阶导数:
\[\begin{align} f^{''}(x) & \approx \frac {1}{ \Delta x } \left( \frac{ f(x+\Delta x) - f(x) }{ \Delta x } + \frac{ f(x) - f(x-\Delta x) } { \Delta x } \right) \\ & \approx \frac { f(x+\Delta x) - 2f(x) + f(x-\Delta x) } { \Delta x^2 } \tag{3.12} \end{align}\]
将公式一般化,我们可写为以下形式:
\[\begin{align} u^{''}_{i} &\approx \frac {1}{ \Delta x } \left( \frac{u_{i+1} - u_{i}}{\Delta x} - \frac{u_{i} - u_{i-1}}{\Delta x} \right) \\ & \approx \frac { u_{i+1} - 2u_{i} + u_{i-1} } { \Delta x^2 } \\ \tag{3.12} \end{align}\]
3.2 构建数值方法
Example 3.1 一根100\(cm\)长的铁棍,初始温度25 \(^\circ C\),在其左右两边分别持续施加100\(^\circ C\)和\(50 ^\circ C\)的温度。 求解:任意时刻铁棍的温度分布。
参考信息:
为求解这个铁棍中的温度变化问题,我们继续使用@ref{modeling}当中的方法,该方法总结为CLAMS方法:概念描述(Conceptual model)、物理定律(physic Laws)、假设(Assumptions)、 数学推导(Math derivation)、求解(Solver)。
概念描述
空间微分,如图。
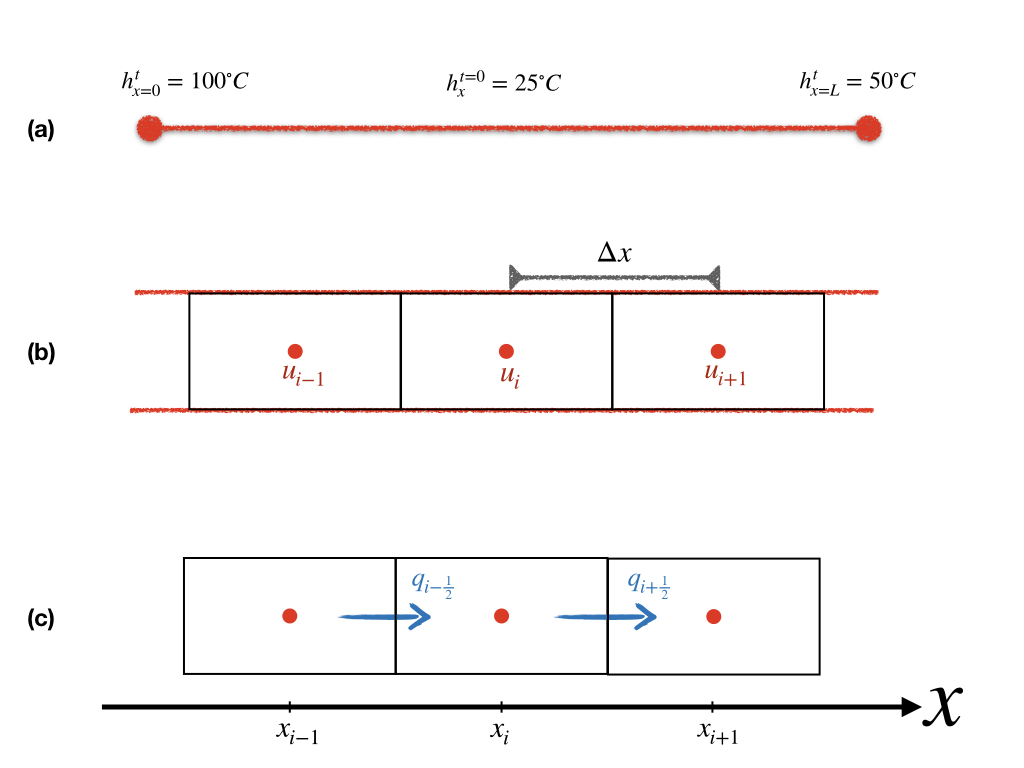
物理定律
能量守恒:
能量变化 = 能量流入 - 能量流出 \[ \Delta E = Q _{in} - Q _{out} \]假设 此问题的假设包括:
- 铁棍绝热,即两端之外的部分并不存在热传递作用。
- 忽略热辐射作用。
- 铁棍的介质/物理属性均一。
数学推导
\[ 通量 = \frac {量}{单位时间 \cdot 单位面积} \]
- \(k\) - 热传导率[\(W m^{-1} K ^{-1}\)]。
- \(c\) - 比热容(specific heat capacity)[\(J {kg}^{-1} K ^{-1}\)]。
- \(\rho\) - 密度[\({kg} m^{-3}\)]。
- \(A\) - 截面积[\(m^2\)]。
- \(D\) - 热力学扩散度(Thermal diffusivity)\(D = \frac{k}{\rho c}\) [\(m^2 s^{-1}\)]。
\[ \rho * c * \Delta x * A * \Delta u = q_{in} * A * \Delta t - q_{out} * A * \Delta t\] 两边同时除以\(\rho c \Delta x A\),得到 \[\frac {\Delta u}{\Delta t} = \frac{1}{\rho c} \frac{q_{in} - q_{out}}{\Delta x}\] 以上公式当\(\Delta x\)趋近与0,\(\Delta t\)趋近于0时,得到微分形式: \[\frac {\partial u}{\partial t} = \frac{1}{\rho c} \frac{\partial q} {\partial x}\]
\[q = k \frac{\partial u}{\partial x}\] 则得到其控制方程: \[\begin{equation} \begin{aligned} \frac {\partial u}{\partial t} &= \frac{1}{\rho c} \frac{\partial q} {\partial x} \\ &= \frac{1}{\rho c} \frac{k \frac{\partial u}{\partial x} } {\partial x} \\ &= D\frac{\partial } {\partial x} \left(\frac{\partial u}{\partial x} \right) \end{aligned} \end{equation}\]
令\(D=\frac{k}{\rho c}\),单位[\(m s^{-2}\)],则最终控制方程(Governing Equation)写为
\[\begin{equation} \frac {\partial u}{\partial t} =D\frac{\partial ^2 u} {\partial x^2} \tag{3.13} \end{equation}\]
控制方程,通常是我们关键数学/数值求解的核心对象,控制方程也是我们对问题最重要的描述,其中已经包含了问题的概念描述、假设、物理定律等信息。
求解
这里我们使用数值方法对本问题进行求解。
由一阶泰勒级数可知,控制方程(3.13)左边(Left Hand Side, LHS)可写为: \[\frac {\partial u}{\partial t} = D\frac{u^{t}_{i} - u^{t-1}_{i} }{\Delta t} + O(1)\]
控制方程(3.13)右边(Right Hand Side, RHS)可写为: \[\begin{equation} \frac{\partial ^2 u} {\partial x^2} =\frac{u^{t-1}_{i+1} - 2u^{t-1}_{i} + u^{t-1}_{i-1} }{\Delta x} + O(2) \end{equation}\]
或者
\[\begin{equation} \frac{\partial ^2 u} {\partial x^2} =\frac{u^{t}_{i+1} - 2u^{t}_{i} + u^{t}_{i-1} }{\Delta x} + O(2) \end{equation}\]
此时,方程左边在时间尺度上具有一阶截取误差,方程右边在空间尺度上具有二阶截断误差。省去误差项,离散化后控制方程写为:
\[\begin{equation} \frac{u^{t}_{i} - u^{t-1}_{i} }{\Delta t} = D \frac{u^{t-1}_{i+1} - 2u^{t-1}_{i} + u^{t-1}_{i-1} }{\Delta x ^2} \tag{3.14} \end{equation}\]
或者
\[\begin{equation} \frac{u^{t}_{i} - u^{t-1}_{i} }{\Delta t} = D \frac{u^{t}_{i+1} - 2u^{t}_{i} + u^{t}_{i-1} }{\Delta x ^2} \tag{3.15} \end{equation}\]
3.3 显式求解法
显式求解法以公式(3.14)作为起点,该公式可变形为: \[ u^{t}_{i} - u^{t-1}_{i} = \frac{D \Delta t}{{\Delta x}^2} \left( u^{t-1}_{i+1} - 2u^{t-1}_{i} + u^{t-1}_{i-1} \right) \] 令\(\alpha = \frac{D \Delta t}{\Delta x^2}\), \(\beta = 1 - 2\alpha\),整理以上公式可得:
\[\begin{equation} \begin{aligned} u^{t}_{i} - u^{t-1}_{i} &= \alpha \left( u^{t-1}_{i+1} - 2u^{t-1}_{i} + u^{t-1}_{i-1} \right) \\ u^{t}_{i} &= \alpha u^{t-1}_{i+1} + (1- 2\alpha) u^{t-1}_{i} + \alpha u^{t-1}_{i-1} \\ u^{t}_{i} &= \alpha u^{t-1}_{i+1} + \beta u^{t-1}_{i} + \alpha u^{t-1}_{i-1} \end{aligned} \end{equation}\]
将以上公式应用于离散点上,
| 点号 \(i\) | 公式 |
|---|---|
| 1 | 边界条件: \(u^{t}_{1} = U_{0}\) |
| 2 | \(u^{t}_{2} = \alpha u^{t-1}_{3} + \beta u^{t-1}_{2} + \alpha u^{t-1}_{1}\) |
| 3 | \(u^{t}_{3} = \alpha u^{t-1}_{4} + \beta u^{t-1}_{3} + \alpha u^{t-1}_{2}\) |
| 4 | \(u^{t}_{4} = \alpha u^{t-1}_{5} + \beta u^{t-1}_{4} + \alpha u^{t-1}_{3}\) |
| 5 | \(u^{t}_{5} = \alpha u^{t-1}_{6} + \beta u^{t-1}_{5} + \alpha u^{t-1}_{4}\) |
| … | … |
| i-1 | … |
| i | \(u^{t}_{i} = \alpha u^{t-1}_{i+1} + \beta u^{t-1}_{i} + \alpha u^{t-1}_{i-1}\) |
| i+1 | … |
| … | … |
| n-2 | \(u^{t}_{n-2} = \alpha u^{t-1}_{n-1} + \beta u^{t-1}_{n-2} + \alpha u^{t-1}_{n-3}\) |
| n-1 | \(u^{t}_{n-1} = \alpha u^{t-1}_{n} + \beta u^{t-1}_{n-1} + \alpha u^{t-1}_{n-2}\) |
| n | 边界条件: \(u^{t}_{n} = U_{L}\) |
由此我们得到\(n\)个算式,可转换为矩阵形式:
\[\begin{equation} \begin{bmatrix} u_{1}^{t} \\ u_{2}^{t} \\ u_{3}^{t} \\ u_{4}^{t} \\ \dots \\ u_{i}^{t} \\ \dots \\ u_{n-3}^{t} \\ u_{n-2}^{t} \\ u_{n-1}^{t} \\ u_{n}^{t} \end{bmatrix} = \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & \dots & 0 & 0 & 0 & 0\\ \alpha & ~\beta~ & \alpha & 0 & \dots & 0 & 0 & 0 & 0\\ 0 & \alpha & ~\beta~ ~& \alpha & \dots & 0 & 0 & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0 & \dots & \alpha & ~\beta~& \alpha & \dots & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0& 0 & 0 & \dots & \alpha~& ~\beta~ & \alpha & 0 \\ 0 & 0& 0 & 0 & \dots & 0 & \alpha & ~\beta~ & \alpha \\ 0 & 0& 0 & 0 & \dots & 0 & 0& 0 &{\textcolor{red}{1}} \end{bmatrix} \begin{bmatrix} U_{0} \\ u_{2}^{t-1} \\ u_{3}^{t-1} \\ u_{4}^{t-1} \\ \dots \\ u_{i}^{t-1} \\ \dots \\ u_{n-3}^{t-1} \\ u_{n-2}^{t-1} \\ u_{n-1}^{t-1} \\ U_{L} \end{bmatrix} \end{equation}\]
更简洁的方式,可写为:
\[\begin{equation} \begin{bmatrix} u_{1} \\ u_{2} \\ u_{3} \\ u_{4} \\ \dots \\ u_{i} \\ \dots \\ u_{n-3} \\ u_{n-2} \\ u_{n-1} \\ u_{n} \end{bmatrix} ^{t} = \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & \dots & 0 & 0 & 0 & 0\\ \alpha & ~\beta~ & \alpha & 0 & \dots & 0 & 0 & 0 & 0\\ 0 & \alpha & ~\beta~ ~& \alpha & \dots & 0 & 0 & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0 & \dots & \alpha & ~\beta~& \alpha & \dots & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0& 0 & 0 & \dots & \alpha~& ~\beta~ & \alpha & 0 \\ 0 & 0& 0 & 0 & \dots & 0 & \alpha & ~\beta~ & \alpha \\ 0 & 0& 0 & 0 & \dots & 0 & 0& 0 &{\textcolor{red}{1}} \end{bmatrix} \begin{bmatrix} U_{0} \\ u_{2} \\ u_{3} \\ u_{4} \\ \dots \\ u_{i} \\ \dots \\ u_{n-3} \\ u_{n-2} \\ u_{n-1} \\ U_{L} \end{bmatrix} ^{t-1} \end{equation}\]
下一时刻(\(t\))的变量组成的向量\(x\)由一个矩阵\([A]\)乘以已知的前一时刻(\(t-1\))的向量\(b\)获得,即:。 \[ x = [A] * b \] 由已知变量的矩阵求解未知变量的方法,称为显式求解法。
3.4 隐式求解法
显式求解法以公式(3.15)作为起点,该公式可变形为: \[ u^{t}_{i} - u^{t-1}_{i} = \frac{D \Delta t}{{\Delta x}^2} \left( u^{t}_{i+1} - 2u^{t}_{i} + u^{t}_{i-1} \right) \] 令\(\alpha = \frac{D \Delta t}{\Delta x^2}\), \(\beta = -1 - 2\alpha\),整理以上公式可得:
\[\begin{equation} \begin{aligned} u^{t}_{i} - u^{t-1}_{i} &= \alpha \left( u^{t}_{i+1} - 2u^{t}_{i} + u^{t}_{i-1} \right) \\ -u^{t-1}_{i} &= \alpha u^{t}_{i+1} + (-1- 2\alpha) u^{t}_{i} + \alpha u^{t}_{i-1} \\ -u^{t-1}_{i} &= \alpha u^{t}_{i+1} + \beta u^{t}_{i} + \alpha u^{t}_{i-1} \end{aligned} \end{equation}\]
将以上公式应用于离散点上,
| 点号 \(i\) | 公式 |
|---|---|
| 1 | 边界条件: \(u^{t-1}_{1} = U_{0}\) |
| 2 | \(-u^{t-1}_{2} = \alpha u^{t}_{3} + \beta u^{t}_{2} + \alpha u^{t}_{1}\) |
| 3 | \(-u^{t-1}_{3} = \alpha u^{t}_{4} + \beta u^{t}_{3} + \alpha u^{t}_{2}\) |
| 4 | \(-u^{t-1}_{4} = \alpha u^{t}_{5} + \beta u^{t}_{4} + \alpha u^{t}_{3}\) |
| 5 | \(-u^{t-1}_{5} = \alpha u^{t}_{6} + \beta u^{t}_{5} + \alpha u^{t}_{4}\) |
| … | … |
| i-1 | … |
| i | \(-u^{t-1}_{i} = \alpha u^{t}_{i+1} + \beta u^{t}_{i} + \alpha u^{t}_{i-1}\) |
| i+1 | … |
| … | … |
| n-2 | \(-u^{t-1}_{n-2} = \alpha u^{t}_{n-1} + \beta u^{t}_{n-2} + \alpha u^{t}_{n-3}\) |
| n-1 | \(-u^{t-1}_{n-1} = \alpha u^{t}_{n} + \beta u^{t}_{n-1} + \alpha u^{t}_{n-2}\) |
| n | 边界条件: \(u^{t-1}_{n} = U_{L}\) |
由此我们得到\(n\)个算式,可转换为矩阵形式:
\[\begin{equation} \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & \dots & 0 & 0 & 0 & 0\\ \alpha & ~\beta~ & \alpha & 0 & \dots & 0 & 0 & 0 & 0\\ 0 & \alpha & ~\beta~ ~& \alpha & \dots & 0 & 0 & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0 & \dots & \alpha & ~\beta~& \alpha & \dots & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0& 0 & 0 & \dots & \alpha~& ~\beta~ & \alpha & 0 \\ 0 & 0& 0 & 0 & \dots & 0 & \alpha & ~\beta~ & \alpha \\ 0 & 0& 0 & 0 & \dots & 0 & 0& 0 &{\textcolor{red}{1}} \end{bmatrix} \begin{bmatrix} U_{0} \\ u_{2}^{t} \\ u_{3}^{t} \\ u_{4}^{t} \\ \dots \\ u_{i}^{t} \\ \dots \\ u_{n-3}^{t} \\ u_{n-2}^{t} \\ u_{n-1}^{t} \\ U_{L} \end{bmatrix} = - \begin{bmatrix} u_{1}^{t-1} \\ u_{2}^{t-1} \\ u_{3}^{t-1} \\ u_{4}^{t-1} \\ \dots \\ u_{i}^{t-1} \\ \dots \\ u_{n-3}^{t-1} \\ u_{n-2}^{t-1} \\ u_{n-1}^{t-1} \\ u_{n}^{t-1} \end{bmatrix} \end{equation}\]
更简洁的方式,可写为:
\[\begin{equation} \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & \dots & 0 & 0 & 0 & 0\\ \alpha & ~\beta~ & \alpha & 0 & \dots & 0 & 0 & 0 & 0\\ 0 & \alpha & ~\beta~ ~& \alpha & \dots & 0 & 0 & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0 & \dots & \alpha & ~\beta~& \alpha & \dots & 0 & 0\\ \dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots &\dots \\ 0 & 0& 0 & 0 & \dots & \alpha~& ~\beta~ & \alpha & 0 \\ 0 & 0& 0 & 0 & \dots & 0 & \alpha & ~\beta~ & \alpha \\ 0 & 0& 0 & 0 & \dots & 0 & 0& 0 &{\textcolor{red}{1}} \end{bmatrix} \begin{bmatrix} U_{0} \\ u_{2} \\ u_{3} \\ u_{4} \\ \dots \\ u_{i} \\ \dots \\ u_{n-3} \\ u_{n-2} \\ u_{n-1} \\ U_{L} \end{bmatrix} ^{t} = - \begin{bmatrix} u_{1} \\ u_{2} \\ u_{3} \\ u_{4} \\ \dots \\ u_{i} \\ \dots \\ u_{n-3} \\ u_{n-2} \\ u_{n-1} \\ u_{n} \end{bmatrix} ^{t-1} \end{equation}\]
一个矩阵\([A]\)乘以下一时刻(\(t\))的变量组成的向量\(x\)等于已知的前一时刻(\(t-1\))的向量\(b\),求解该方程则可得到\(x\)的值,数学表达为:
\[[A] * x = b\]
通用的求解法为 \[ x = [A]^{-1} * b \]
通过已知变量、未知变量和矩阵组成的公式或函数来求解未知变量的过程,称为隐式求解法。
3.5 编程求解
显式求解法
#' Problem: 1D Heat Transfer
#' governing Eqn: du/dt = k/r/c * (dd u / d x^2)
#' wiki: https://en.wikipedia.org/wiki/Thermal_diffusivity
#' wiki: https://en.wikipedia.org/wiki/Heat_equation
#' BC U0 = 100, UL=50
#' IC uic = 25
#' X = c(0, 1)
#' D = 23 mm2/s = 2.3e-5 m^2/s
#' DX = 0.01 m
#' DT = 10 s
#' Time = 0 to 1e6 s
HT.explicit <- function(
U0=100, UL=50, uic = 25,
X = 1,
DX= 0.1,
DT = 1,
DD = 2.3e-5,
Tmax = 1e5,
epsilon = 1e-4, bc2 = NULL, ignore.cfl = FALSE, plot = TRUE
){
T0 = 0
tt = seq(T0, Tmax, DT)
NT = length(tt)
xx = seq(0, X, DX)
NX = X / DX + 1
alpha = DD * DT / (DX * DX)
beta = 1-2*alpha
CFL = DD * DT / (DX * DX)
print(CFL)
if(!ignore.cfl){
if(CFL >=1 ){
stop()
}
}
#' =========================================
x0 = rep(uic, NX)
#' =========================================
ylim = c(min(x0), max(U0, UL))
xlim=c(0, X)
if(plot){
plot(xx, x0, type='b', col=2, lwd=3, ylim=ylim, xlim=xlim, xlab=xlab, ylab=ylab)
grid()
lines(x=c(1,1) * 0, y=c(min(x0), U0), lwd=2, col=3, type='b')
lines(x=c(1,1) * X, y=c(min(x0), UL), lwd=2, col=3, type='b')
text(x=X/2 , y = uic + diff(ylim)*.051, 'Initial condition', font=2)
text(x=X * 0.05 , y = U0, 'BC 1', font=2)
text(x=X * 0.95 , y = UL, 'BC 2', font=2)
}
#' =========================================
mat = matrix(0, nrow = NX, ncol = NX)
for(i in 1:NX){
for(j in 1:NX){
if(i==j){
mat[i, j] = beta
}
if(i+1 == j | i-1 == j ){
mat[i, j] = alpha
}
}
}
mat[1,]=c(1, rep(0, NX-1))
mat[NX,]=c(rep(0, NX-1), 1)
xm = matrix(NA, nrow=NX, ncol=NT)
vs = cbind(rep(0, NX))
# vs[NX/2] = ss
b=bx = cbind(x0)
for(i in 1:NT){
if(i>1){
bx = mat %*% b + vs * DT
if(any(is.nan(bx))) { break }
if(mean(abs(b-bx)) < epsilon) { break }
}
bx[1] = U0
bx[NX] = UL
xm[, i]=bx
b = bx
}
NT = i
xm=xm[, 1:NT]
# message('CFL value = ', CFL)
# message('Total Timesteps (dt * nt)= ', DT, ' * ', NT)
yy = xm; yy[abs(yy)>1e20] = NA
ret = list('x' = xx,
'time' = tt,
'u' = xm,
'CFL' = CFL,
'DT' = DT,
'NT' = NT,
'xlim' = xlim,
'ylim' = ylim)
return(ret)
}
plot1 <- function(x, nout = 20){
NT = x$NT
id=10^seq(0, log10(x$NT), length.out = nout)
col=colorspace::diverge_hcl(n=length(id)); lty=1
matplot(x=x$x, y=x$u[, id], type='l', ylim=x$ylim, xlim=x$xlim,
xlab=xlab, ylab=ylab, col=col, lty=lty)
legend('topright', paste0('T=', x$time[id]+1), col=col, lty=lty, bg='transparent')
mtext(text = paste('CFL =', x$CFL ), side=3, cex=1.5)
}
plot2 <- function(x){
NT = x$NT
id = c(2, 4, 6, 8); nid=length(id)
lty=1:nid; col=lty
matplot(t(x$u[id, ]), type='l', xlab=xlab, ylab=ylab, col=col, lty=lty); grid()
legend('bottomright',col=col, lty=lty, paste('Node', id))
}隐式求解法
#' Problem: 1D Heat Transfer
#' governing Eqn: du/dt = k/r/c * (dd u / d x^2)
#' wiki: https://en.wikipedia.org/wiki/Thermal_diffusivity
#' wiki: https://en.wikipedia.org/wiki/Heat_equation
#' BC U0 = 100, UL=50
#' IC uic = 25
#' X = c(0, 1)
#' D = 23 mm2/s = 2.3e-5 m^2/s
#' DX = 0.01 m
#' DT = 10 s
#' Time = 0 to 1e6 s
HT.implicit <- function(
U0=100, UL=50, uic = 25,
X = 1,
DX= 0.1,
DT = 1,
DD = 2.3e-5,
Tmax = 1e5,
epsilon = 1e-4, bc2 = NULL, ignore.cfl = FALSE, plot = TRUE
){
T0 = 0
tt = seq(T0, Tmax, DT)
NT = length(tt)
xx = seq(0, X, DX)
NX = X / DX + 1
alpha = -DD * DT / (DX * DX)
beta = 1 + 2 * DD * DT / (DX * DX)
CFL = DD * DT / (DX * DX)
print(CFL)
if(!ignore.cfl){
if(CFL >=1 ){
stop()
}
}
#' =========================================
x0 = rep(uic, NX)
#' =========================================
ylim = c(min(x0), max(U0, UL))
xlim=c(0, X)
if(plot){
plot(xx, x0, type='b', col=2, lwd=3, ylim=ylim, xlim=xlim, xlab=xlab, ylab=ylab)
grid()
lines(x=c(1,1) * 0, y=c(min(x0), U0), lwd=2, col=3, type='b')
lines(x=c(1,1) * X, y=c(min(x0), UL), lwd=2, col=3, type='b')
text(x=X/2 , y = uic + diff(ylim)*.051, 'Initial condition', font=2)
text(x=X * 0.05 , y = U0, 'BC 1', font=2)
text(x=X * 0.95 , y = UL, 'BC 2', font=2)
}
#' =========================================
mat = matrix(0, nrow = NX, ncol = NX)
for(i in 1:NX){
for(j in 1:NX){
if(i==j){
mat[i, j] = beta
}
if(i+1 == j | i-1 == j ){
mat[i, j] = alpha
}
}
}
mat[1,]=c(1, rep(0, NX-1))
mat[NX,]=c(rep(0, NX-1), 1)
xm = matrix(NA, nrow=NX, ncol=NT)
vs = cbind(rep(0, NX))
# vs[NX/2] = ss
b=bx=cbind(x0)
for(i in 1:NT){
if(i>1){
bx = solve(mat, b)
if(any(is.nan(bx))) { break }
if(mean(abs(b-bx)) < epsilon) { break }
}
bx[1] = U0
bx[NX] = UL
xm[, i]=bx
b = bx
}
NT = i
xm=xm[, 1:NT]
# message('CFL value = ', CFL)
# message('Total Timesteps (dt * nt)= ', DT, ' * ', NT)
yy = xm; yy[abs(yy)>1e20] = NA
ret = list('x' = xx,
'time' = tt,
'u' = xm,
'CFL' = CFL,
'DT' = DT,
'NT' = NT,
'xlim' = xlim,
'ylim' = ylim)
return(ret)
}
plot1 <- function(x, nout = 20){
NT = x$NT
id=10^seq(0, log10(x$NT), length.out = nout)
col=colorspace::diverge_hcl(n=length(id)); lty=1
matplot(x=x$x, y=x$u[, id], type='l', ylim=x$ylim, xlim=x$xlim,
xlab=xlab, ylab=ylab, col=col, lty=lty)
legend('topright', paste0('T=', x$time[id]+1), col=col, lty=lty, bg='transparent')
mtext(text = paste('CFL =', x$CFL ), side=3, cex=1.5)
}
plot2 <- function(x){
NT = x$NT
id = c(2, 4, 6, 8); nid=length(id)
lty=1:nid; col=lty
matplot(t(x$u[id, ]), type='l', xlab=xlab, ylab=ylab, col=col, lty=lty); grid()
legend('bottomright',col=col, lty=lty, paste('Node', id))
}3.6 显式与隐式求解法对比
3.6.1 CFL条件
source("Code/ch03/ch3_HeatTransferIm.R")
xlab ='Distance (m)'
ylab = 'Temperature (C)'
x = HT.implicit(DX= 0.05, DT = 1000, U0=100, UL=50, uic = 25, ignore.cfl=TRUE, plot=FALSE)## [1] 9.2
3.6.2 计算效率
source("Code/ch03/ch3_HeatTransferIm.R")
source("Code/ch03/ch3_HeatTransferEx.R")
Tmax = 1e4
t0 = Sys.time()
x=HT.explicit(DX= 0.025, DT = 5, U0=100, UL=50, uic = 25, X = 1, ignore.cfl=FALSE, plot=FALSE, Tmax=Tmax)## [1] 0.184t1 = Sys.time()
tu.ex = t1 - t0
t0 = Sys.time()
x=HT.implicit(DX= 0.025, DT = 5, U0=100, UL=50, uic = 25, X = 1, ignore.cfl=FALSE, plot=FALSE, Tmax=Tmax)## [1] 0.184## Time for implicit =0.0986859798431396## Time for explicit =0.06230092048645023.7 二维有限差分
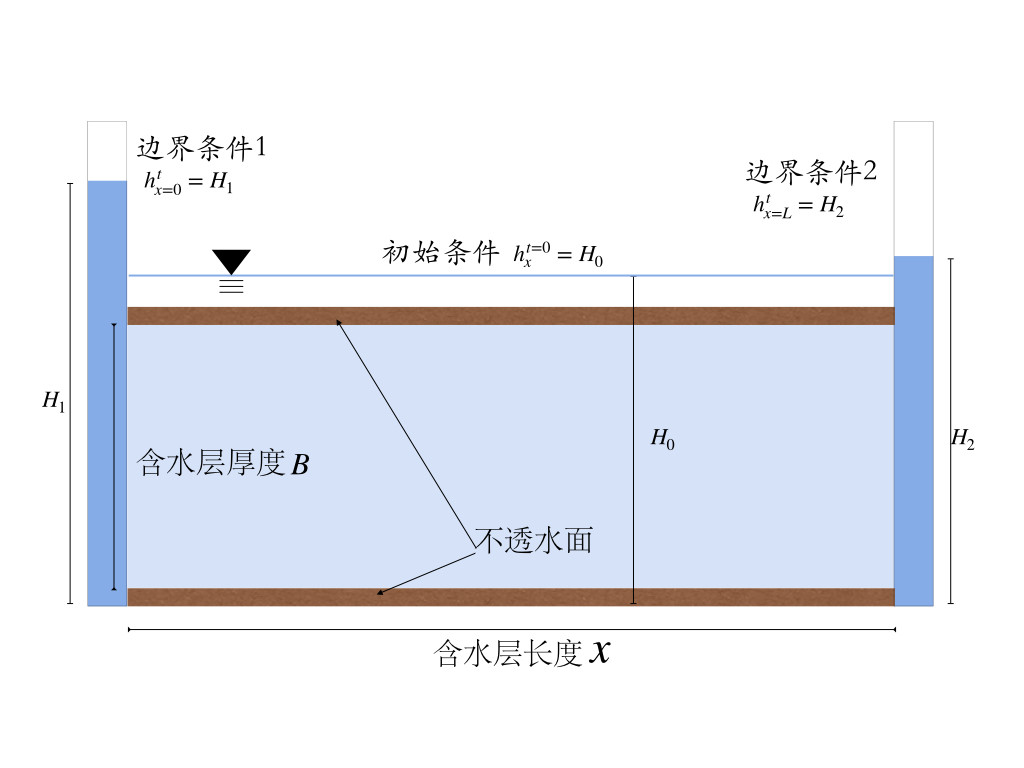
Example 3.2 \[ s \frac{dh}{dt} = k_{x} B * \frac{d^2 h}{d x^2} + k_{y} B * \frac{d^2 h}{d y^2} + s_s \]
令\(D_x = \frac{k_x B}{s}\)和\(D_y = \frac{k_y B}{s}\)。
公式推导:
右边: \[\frac{\partial u}{\partial t} = \frac{u^{t+1}_{i, j} - u^{t}_{i, j} }{ \Delta t}\]
左边:
\[D_x\frac{\partial ^2 u}{\partial x^2} + D_y\frac{\partial ^2 u}{\partial y^2}= D_x\frac{u^{t}_{i+1, j} - 2 u^{t}_{i, j} + u^{t}_{i-1, j} }{ {\Delta x }^2} + D_y\frac{u^{t}_{i, j+1} - 2 u^{t}_{i, j} + u^{t}_{i, j-1} }{ {\Delta y }^2}\]
控制方程离散化后得到: \[ \frac{u^{t+1}_{i, j} - u^{t}_{i, j} }{ \Delta t} = D_x\frac{u^{t}_{i+1, j} - 2 u^{t}_{i, j} + u^{t}_{i-1, j} }{ {\Delta x }^2} + D_y\frac{u^{t}_{i, j+1} - 2 u^{t}_{i, j} + u^{t}_{i, j-1} }{ {\Delta y }^2} \]
\[u^{t+1}_{i, j} - u^{t}_{i, j}= \frac{D_x \Delta t}{ {\Delta x }^2} (u^{t}_{i+1, j} - 2 u^{t}_{i, j} + u^{t}_{i-1, j} ) + \frac{D_x \Delta t}{ {\Delta y }^2} (u^{t}_{i, j+1} - 2 u^{t}_{i, j} + u^{t}_{i, j-1})\]
令\(\alpha = \frac{D_x \Delta t}{ {\Delta x }^2}\), \(\beta = \frac{D_x \Delta t}{ {\Delta y }^2}\), \(\gamma = 1-2\frac{D_x \Delta t}{ {\Delta x }^2} - 2\frac{D_x \Delta t}{ {\Delta y }^2}\),公式变为:
\[ u^{t+1}_{i, j} = \alpha u^{t}_{i+1, j} + \beta u^{t}_{i, j+1} + \gamma u^{t}_{i, j} + \beta u^{t}_{i, j-1} + \alpha u^{t}_{i-1, j} \]
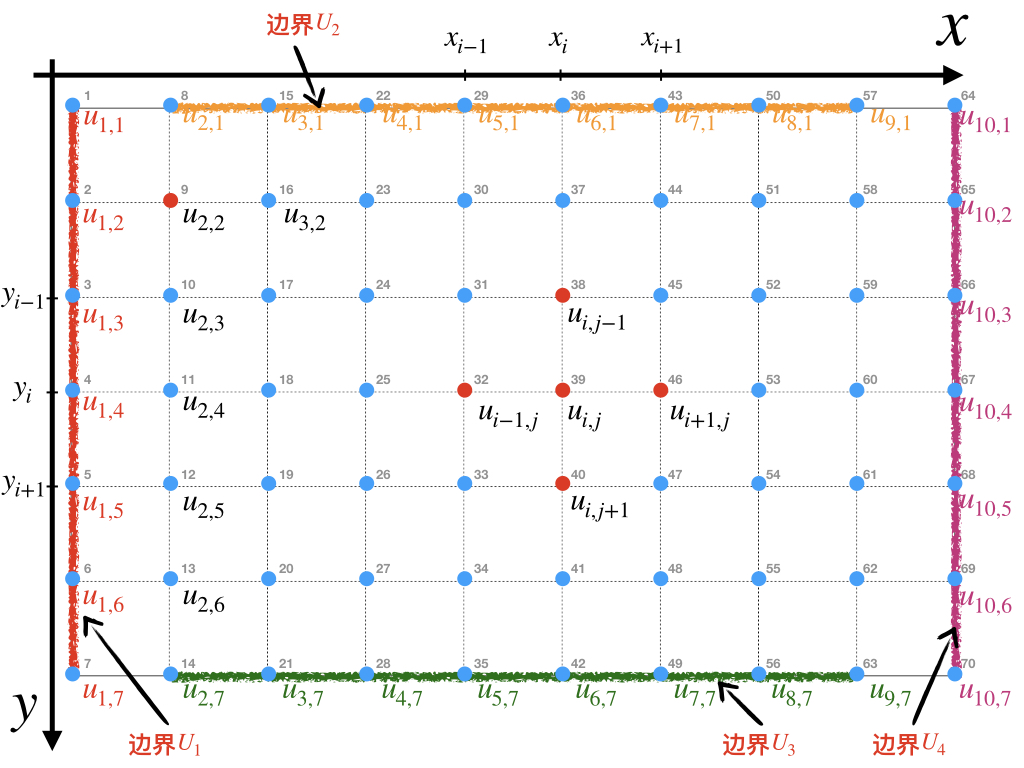
假设\(x\)和\(y\)方向总长为\(L_x\)和\(L_y\),沿两个方向的离散点数为\(N_x =L_x / \Delta x\), \(N_y =L_y / \Delta y\), \(N = N_x * N_y\)。 矩阵形式可表达为: \[ x = A * b \]
\[x = \begin{bmatrix} \begin{bmatrix} u_{1,1} \\ \dots \\ u_{1, N_y} \end{bmatrix} \\ \begin{bmatrix} u_{2,1} \\\dots \\ u_{2, N_y} \end{bmatrix} \\ \dots \\ u_{i,j} \\ \dots \\ \begin{bmatrix} u_{Nx, 1} \\ \dots\\ u_{N_x, N_y} \end{bmatrix} \end{bmatrix} ^{t}\]
\[A = \begin{bmatrix} \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 \\ 0 & {\textcolor{red}{1}} & 0 \\ 0 & 0 & {\textcolor{red}{1}} \end{bmatrix} & 0 & 0 & 0 \\ 0 & \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & 0 & 0 & 0\\ \beta & \dots & \alpha & {\gamma} & \alpha & \dots & \beta \\ 0 & 0 & 0 & 0 &0 & 0 & {\textcolor{red}{1}} \end{bmatrix} & 0 & 0 \\ 0 & 0 & \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 & 0 & 0 & 0 & 0\\ \beta & \dots & \alpha & {\gamma} & \alpha & \dots & \beta \\ 0 & 0 & 0 & 0 &0 & 0 & {\textcolor{red}{1}} \end{bmatrix} & 0 \\ 0 & 0 & 0 & \begin{bmatrix} {\textcolor{red}{1}} & 0 & 0 \\ 0 & {\textcolor{red}{1}} & 0 \\ 0 & 0 & {\textcolor{red}{1}} \end{bmatrix} \\ \end{bmatrix} \]
\[b= \begin{bmatrix} [U_{1}]_{N_y*1} \\ \begin{bmatrix} U_2 \\ u_{2,1} \\\dots \\ U_3 \end{bmatrix}_{N_y*1} \\ \begin{bmatrix} U_2 \\ u_{i,j} \\\dots \\ U_3 \end{bmatrix}_{N_y*1} \\ [U_{4}]_{N_y*1} \end{bmatrix} ^{t-1}\]
3.7.1 编程求解
显式求解
#' Problem: 1D Confined Aquifer
#' governing Eqn: du/dt = DDx * (dd u / d x^2) + DDy * (dd u / d y^2)
#'
diag.matrix <- function(id = c(-1, 0, 1), x = rep(1, length(id)), n = 3, def.val = 0){
val = matrix(x, ncol=length(id), nrow=1)
mat = matrix(def.val, n, n)
nid = length(id)
for(i in 1:n){
for(j in 1:n){
for(k in 1:nid){
if(i + id[k] == j){
mat[i,j] = val[k]
}
}
}
}
mat
}
toBC <- function(idl, x, val){
nbc = length(idl)
for(i in 1:nbc){
x[idl[[i]]] = val[i]
}
x
}
CA.Explicit <- function( bc1 = c(0, 0, 0,0),
bc2 = NULL,
uic = 25,
Lxy = c(1000, 1000),
Dxy = c(50,50),
DD = rep(23 ,2),
epsilon = 0.001,
DT = 25,
Tmax = 1e5,
ignore.cfl = FALSE, plot = TRUE){
DX=Dxy[1]; DY=Dxy[2];
tt = seq(0, Tmax, DT);
NT = length(tt)
xx = seq(0, Lxy[1], DX); NX = length(xx)
yy = seq(0, Lxy[2], DY); NY = length(yy)
# NX = Lxy[1] / DX + 1; NY = Lxy[2] / DY + 1
N = NX * NY
CFL.x = alpha = DD[1] * DT / (DX * DX)
CFL.y = beta = DD[2] * DT / (DY * DY)
gamma = 1 - 2 * alpha - 2 * beta
message('CFL value = (', CFL.x, '\t', CFL.y, ')')
if(!ignore.cfl){
if(CFL.x >=.5 | CFL.y >=.5){
stop()
}
}
mat = diag.matrix(id = c(-NY, -1, 0, 1, NY), n=N,
x=c(alpha, beta, gamma, beta, alpha), def.val = 0)
dmat = diag.matrix(id=0, x=1, n=N, def.val = 0)
idl = list(1:NY,
1+(1:NX - 1)*(NY),
(1:NX) * NY,
(NX-1)*(NY)+1:NY)
nbc = length(idl)
id.bc = sort(unique(unlist(idl)))
mat[id.bc, ] = dmat[id.bc,]
arr = array(NA, dim=c(NY,NX,NT))
# xm = matrix(NA, nrow=N, ncol=NT)
vs = cbind(rep(0, N))
# bc2=list(id=10, x=0.01)
# vs[bc2$id] = bc2$x
b=bx=cbind(rep(uic, N))
b = toBC(idl = idl, x=b, val=bc1)
for(i in 1:NT){
if(i>1){
bx = mat %*% b + vs * DT
if(any(is.nan(bx))) { break }
if(mean(abs(b-bx)) < epsilon) { break }
}
bx = toBC(idl = idl, x=bx, val=bc1)
arr[, , i] = matrix(bx, nrow = NY, ncol = NX)
b = bx
}
NT = i
arr=arr[,, 1:NT]
# message('Total Timesteps (dt * nt)= ', DT, ' * ', NT)
# yy = arr; yy[abs(yy)>1e20] = NA
ret = list('x' = xx,
'y' = yy,
'z' = arr,
'time' = tt,
'CFL' = c(CFL.x, CFL.y),
'DT' = DT,
'NT' = NT
)
return(ret)
}
plot.3d <- function(x, nr=3, nc=4, clim=NULL){
par(mfrow=c(nr, nc), mar=c(1,1,1,1))
idx = round(10^seq(0, log10(x$NT), length.out = nc*nr))
z=x$z;
z[ is.infinite(abs(z)) ] = NA
if(is.null(clim)){
clim = range(z, na.rm = TRUE)
}
for(i in idx ){
plot3D::persp3D(z=z[, , i], clim=clim,
colvar=z[, , i])
mtext(paste('T =', x$DT * i), side= 3, line=-1)
}
}隐式求解
#' Problem: 1D Confined Aquifer
#' governing Eqn: du/dt = DDx * (dd u / d x^2) + DDy * (dd u / d y^2)
#'
diag.matrix <- function(id = c(-1, 0, 1), x = rep(1, length(id)), n = 3, def.val = 0){
val = matrix(x, ncol=length(id), nrow=1)
mat = matrix(def.val, n, n)
nid = length(id)
for(i in 1:n){
for(j in 1:n){
for(k in 1:nid){
if(i + id[k] == j){
mat[i,j] = val[k]
}
}
}
}
mat
}
toBC <- function(idl, x, val){
nbc = length(idl)
for(i in 1:nbc){
x[idl[[i]]] = val[i]
}
x
}
CA.Implicit <- function( bc1 = c(0, 0, 0,0),
bc2 = NULL,
uic = 25,
Lxy = c(1000, 1000),
Dxy = c(50,50),
DD = rep(23 ,2),
epsilon = 0.001,
DT = 25,
Tmax = 1e5,
ignore.cfl = FALSE, plot = TRUE){
DX=Dxy[1]; DY=Dxy[2];
tt = seq(0, Tmax, DT);
NT = length(tt)
xx = seq(0, Lxy[1], DX); NX = length(xx)
yy = seq(0, Lxy[2], DY); NY = length(yy)
# NX = Lxy[1] / DX + 1; NY = Lxy[2] / DY + 1
N = NX * NY
alpha = -DD[1] * DT / (DX * DX)
beta = -DD[2] * DT / (DY * DY)
CFL.x = DD[1] * DT / (DX * DX)
CFL.y = DD[2] * DT / (DY * DY)
gamma = 1 + 2 * DD[1] * DT / (DX * DX) + 2 * DD[2] * DT / (DY * DY)
message('CFL value = (', CFL.x, '\t', CFL.y, ')')
if(!ignore.cfl){
if(CFL.x >=.5 | CFL.y >=.5){
stop()
}
}
#' =========================================
x0 = rep(uic, NX)
mat = diag.matrix(id = c(-NY, -1, 0, 1, NY), n=N,
x=c(alpha, beta, gamma, beta, alpha), def.val = 0)
dmat = diag.matrix(id=0, x=1, n=N, def.val = 0)
idl = list(1:NY,
1+(1:NX - 1)*(NY),
(1:NX) * NY,
(NX-1)*(NY)+1:NY)
nbc = length(idl)
id.bc = sort(unique(unlist(idl)))
mat[id.bc, ] = dmat[id.bc,]
arr = array(NA, dim=c(NY,NX,NT))
vs = cbind(rep(0, N))
b=bx=cbind(rep(uic, N))
b = toBC(idl = idl, x=b, val=bc1)
for(i in 1:NT){
if(i>1){
bx = solve(mat, b + vs * DT)
if(any(is.nan(bx))) { break }
if(mean(abs(b-bx)) < epsilon) { break }
}
bx = toBC(idl = idl, x=bx, val=bc1)
arr[, , i] = matrix(bx, nrow = NY, ncol = NX)
b = bx
}
NT = i
arr=arr[,, 1:NT]
# message('Total Timesteps (dt * nt)= ', DT, ' * ', NT)
# yy = arr; yy[abs(yy)>1e20] = NA
ret = list('x' = xx,
'y' = yy,
'z' = arr,
'time' = tt,
'CFL' = c(CFL.x, CFL.y),
'DT' = DT,
'NT' = NT
)
return(ret)
}
plot.3d <- function(x, nr=3, nc=4, clim=NULL){
par(mfrow=c(nr, nc), mar=c(1,1,1,1))
idx = round(10^seq(0, log10(x$NT), length.out = nc*nr))
z=x$z;
z[ is.infinite(abs(z)) ] = NA
if(is.null(clim)){
clim = range(z, na.rm = TRUE)
}
for(i in idx ){
plot3D::persp3D(z=z[, , i], clim=clim,
colvar=z[, , i])
mtext(paste('T =', x$DT * i), side= 3, line=-1)
}
}对比隐式与显式求解法的时间步长和效率: